 24小时服务电话:
24小时服务电话:








这些年时代一直在转变水下机器人技术得到了快速发展,在深海矿产资源探采领域亦逐步应用。通过冠艺深圳工业设计公司设计的水下机器人进行管外作业是海底管道检修的重要方法,目前国内已有的水下作业机器人由于缺乏可以贴合管道外壁进行沿管道检修作业的专用工具,无法直接用于海底管道的检修作业。冠艺深圳工业设计公司设计、开发一种用于水下作业机器人的沿管道检修作业专用工具,对于降低海底管道检测和修复作业成本、深圳工业设计公司保障海底管道的长时间安全服役意义重大。
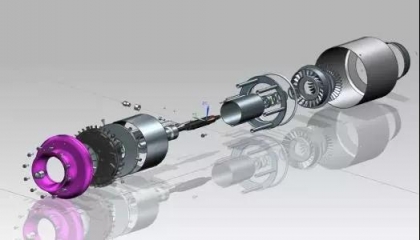
水下机器人结构与设计
气动蠕动式行走装置,该装置采用蠕动方式完成前进和后退,行走的动力来自于气缸。结构简单、控制方便,但行走速度受到限制。考虑到步进行走方式不便于海底管道的连续探测检查作业,另外由于海底管道在水下环境工作,海水的压力会使空气压缩严重,因此该方式不适用海底管道的检修。
关节式管道行走装置,该装置通过其两端的手爪交替抓紧管道实现沿管道的行走,通过各关节处的协调旋转还可以实现沿管道的翻转和扭转行走。能顺利通过弯管和T型管等特殊管段,但其结构复杂,可靠性低,因此不适用于对作业效率和可靠度具有较高要求的海底管道作业。

并联式管道行走装置,该装置包括若干组腿,通过给每组腿输入相应的指令,可以实现其沿着管道行走。其结构简单,但控制较为复杂,同时步进行走方式不便于海底管道的连续探测检查作业。
轮式管道行走装置,该装置通过轮子的转动实现沿管道前进,类似汽车的行进方式。该装置结构简单且控制方便,适宜在平滑的管道上行走,但在弯管和不规则管道上行走时容易发生运动干涉。由于海底管道一般很少出现变外径以及大角度转弯,且海底管道平铺在海底,基本没有需要攀爬的管段。因此选择轮式行走方式作为坐管和沿管道行走的机构形式。

坐管机构设计
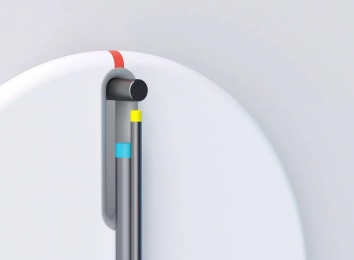
设计的坐管机构主要包括用于连接水下机器人本体的卡箍、用于搭载作业工具的框架以及用于贴管壁行走的支撑轮,如图1所示。其材料采用耐海水腐蚀能力比较强同时重量轻的高强度树脂材料。
坐管机构与水下机器人本体的连接。系统浮心在上,重心在下,在海流等外力干扰下发生偏转后,通过重力和浮力产生的力矩作用可以自动恢复竖直状态,保证行进过程中不发生倾倒。同时,整个系统重量略大于浮力,沿管行进过程中通过富余重力的作用提供坐管的附着力,使坐管机构紧贴管壁。







































 在线咨询
在线咨询





